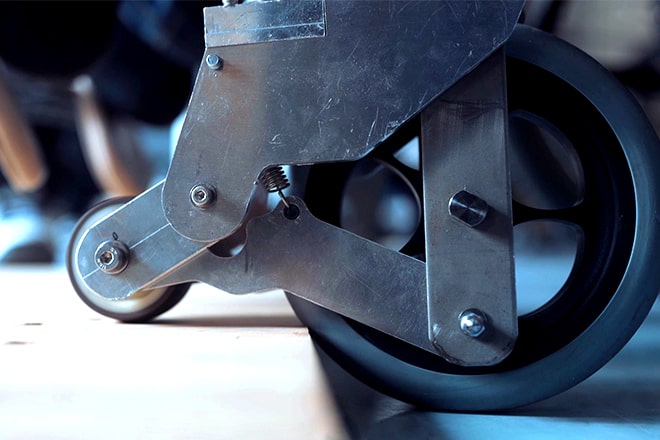
現在、街中にある歩道と車道の間にある段差を乗り越えることができる車椅子用キャスターの開発に取り組んでいます。歩道と車道の段差は、調べてみると20mmから40mmが多いことがわかります。段差が20mmの場合は、既存のキャスターで乗り越えることは可能ですが、40mmになると乗り越えることが難しくなります。本研究における独創性とは、モーターやセンサーなどのロボット工学の技術を一切使わず、メカニズムの工夫だけで、段差の乗り越えを実現させる点にあります。
cf-staff-横田_祥
- 氏名 (姓名は半角スペース区切り)
- 横田 祥
- 職名
- 教授
- 学部
- /content/dam/toyowebstyle/common/content-fragments/cf-faculty-master/cf-faculty-of-science-and-engineering
- 学科・専攻
- /content/dam/toyowebstyle/common/content-fragments/cf-department-master/cf-department-of-mechanical-engineering
- サムネイル写真
- /content/dam/toyowebstyle/common/content-fragments/cf-staffs/y/yokota-sho/photo-profile-sho-yokota.jpg
- フリーテキスト (専門、等)
-
ヒューマンロボットインタラクション研究室
専門:ロボティクス、人間活動支援システム、インタフェース
